1 Introduction
In this article we propose a bottom-up approach to higher-level mental states, such as, for example, consciousness. In contrast to most related approaches, we do not take consciousness as our point of departure, but rather aim, firstly, to construct a system that has basic properties of a reactive system. In a second step, this system will be expanded and will gain cognitive properties in the sense of being able to plan ahead. Only after this work is finished, we ask to what extent this system is equipped with higher-level properties as for example emotions or consciousness. While other approaches would require an exact definition of, for example, consciousness, in our case we do not have to start from a clear-cut definition and try to fit it into a model. We follow this alternative route because there are no generally accepted definitions concerning these higher-level phenomena. In this way we hope to identify the essential elements required to instantiate, for example, consciousness.
The idea behind this approach is that higher-level properties may arise as emergent properties, i.e., may occur without requiring explicit implementation of the phenomenon under examination but instead arise from the cooperation of lower-level elements. Some authors distinguish between “strong” emergence and “weak” emergence (e.g., Laughlin & Pines 2000). Strong emergence means that there is principally no way to explain the emergent property by known properties of the elements of the system and their coupling. Here we are dealing with weak emergence. In this case, a property recognized when looking at the whole system can at first glance not be traced back (or perhaps only partially) to known properties of the elements and their couplings. Often, auxiliary assumptions are made to explain this property as a global property, i.e., as a property ascribed to the system as a whole. A more detailed inspection may, however, show that such auxiliary assumptions are not required. Instead, the emergent property follows from the properties of the elements and the specific ways in which they causally interact. This insight allows for an understanding of an emergent property in the sense that this property can be predicted, although we may not understand why it arises, and that one is able to construct a new system showing this property.
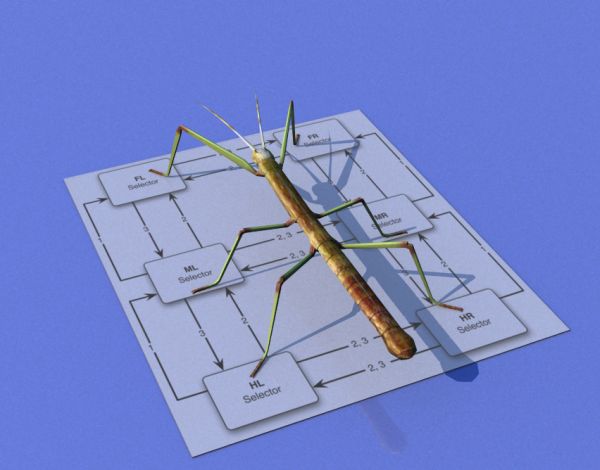 Figure 1: Arrangement of the leg-controllers (boxes: FL front left, ML middle left, HL hind left, FR front right, MR middle right, HL hind right) of the hexapod walker. The arrows show coordinating influences (1–4) that act between neighbouring leg-controllers.
Figure 1: Arrangement of the leg-controllers (boxes: FL front left, ML middle left, HL hind left, FR front right, MR middle right, HL hind right) of the hexapod walker. The arrows show coordinating influences (1–4) that act between neighbouring leg-controllers.
Following this approach, one crucial decision to be made at the beginning concerns the granularity of the lower-level elements. In our approach, we start from a behavioral perspective and focus on the nervous system as central to the control of action. Therefore, we use neuronal units as the basic elements for our modeling and for the analysis. Specifically, we use artificial neural network units with analogue activation values and dynamic (low-pass filter) properties.[1] That is, our neural elements are qualitatively comparable with non-spiking neurons. Although there are arguments that consciousness, in order to arise, might require synchronously oscillating spikes (Singer & Gray 1995), we claim that the level applied here is general enough to allow for an understanding of such mental processes. As a side effect, this level of abstraction covers different evolutionary groups, such as those represented by insects and mammals, for example. Though much of our discussion, below, focuses on the example of insects, we do not want to argue that insects have all the higher-level properties addressed later in this article, but only that they share the same fundamental functions used in motor control and have, on that level, a comparable structure.
Using these simple neural elements, we start by implementing very basic faculties that include the ability to move one’s own (non-trivial[2]) body, and allow for orientation and navigation in an only partially known environment. To this end we use a body with six, insect-like legs. This means that we deal with at least eighteen active degrees of freedom (DoF) and not two—as is the case for many robots that are restricted to moving around on a two-dimensional plane. This means that the controller has to deal with a large number of redundant DoFs. To control the behavior of the robot we use a reactive and embodied neuronal controller, as it is available from earlier work on insect behavior (Schilling et al. 2013a). Later, a minor expansion of the network will allow for cognitive faculties.
What are the properties of the reactive/cognitive system considered here? The reactive system is called “Walknet” and it is based on biological insights from experiments on the walking behavior of stick insects (Dürr et al. 2004; Bläsing 2006; Schilling et al. 2013b). As will be explained in section 2, Walknet was set up as a system for controlling the walking behavior of a six-legged system in an unpredictable environment, e.g., on cluttered terrain or climbing over large gaps—which, when performed in a realistic, natural environment is a non-trivial task. Already on this level we can observe emergent properties. The number of legs on the ground differs depending on the velocity of the walker (for slower walking more legs are on the ground). As a consequence the phase relations between different legs differ depending on the velocity of the walker. Importantly, the resulting stepping patterns (“gaits”) are not explicitly encoded in the control network, but are a result of the interaction of the control network with the environment as mediated through the body (1st order embodiment Metzinger 2014). In a further step, the reactive controller is expanded to be able to deal with navigation tasks. This additional network, called “Navinet”, is able to simulate a number of experimental results observed in desert ants and honeybees, such as the capability of finding food sources using path integration and orientation with respect to visual landmarks.
Both networks are characterized by their decentralized nature. These networks consist of procedural, (reactive) elements, namely small neural networks that in general connect sensory input with motor output, thereby forming the procedural memory. Inspired by (Maes 1991), these procedural elements are coupled via a “motivation unit network”, a recurrent neural network (RNN) that forms the backbone of the complete system. This type of architecture has been termed MUBCA (for Motivation Unit Based Columnar Architecture (MUBCA), Schilling et al. 2013b). The motivation unit network allows for selection of different behaviors by adopting different attractor states, where each attractor represents a group of motivation units being activated, which in turn control the procedural elements. As the different groups do in part overlap, albeit in different ways, the network allows for the representation of a heterarchical structure (e.g., see left upper part of figure 2).
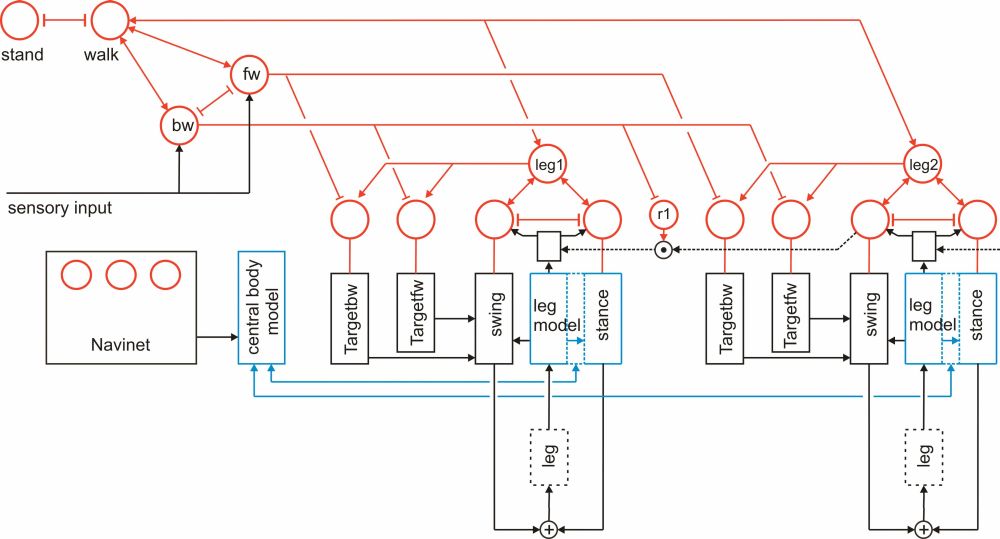 Figure 2: The network controlling the reactive system. Motivation units (red) form an RNN that can assume various attractor states (only two leg-controllers are shown). Arrows show excitatory influences, T-shaped connections show inhibitory influences (fw forward, bw backward, r1 coordination rule 1) The motivation units at the lower margin control procedures (boxes, e.g., swing, stance). The procedures include the internal body model (blue). The body is marked by dashed boxes (“leg”). Indicated here is the network Navinet that controls walking direction (see figure 4 for more details).
Figure 2: The network controlling the reactive system. Motivation units (red) form an RNN that can assume various attractor states (only two leg-controllers are shown). Arrows show excitatory influences, T-shaped connections show inhibitory influences (fw forward, bw backward, r1 coordination rule 1) The motivation units at the lower margin control procedures (boxes, e.g., swing, stance). The procedures include the internal body model (blue). The body is marked by dashed boxes (“leg”). Indicated here is the network Navinet that controls walking direction (see figure 4 for more details).
As a next “evolutionary” step, this reactive network will be expanded to be able to embrace cognitive properties (sects. 3 and 6). The notion of cognition is often used in a broad and sometimes unspecific way. In the following we will rely on the definition given by McFarland & Bösser (1993) who assume that a cognitive system is characterized by the capability of planning ahead. We prefer this clear-cut definition of cognition compared to many others found in the literature, as the latter are generally quite weak (in extreme cases cognitive properties are even attributed to bacteria, which, in our view, would make the term cognition meaningless). While such a specific definition might seem too narrow, in our understanding it captures the essence of cognition. Focusing on planning ahead being realized by mental simulation (Hesslow 2002) allows extending this notion of cognition to easily include other high-level phenomena, while still relying on the same internal mechanism. Therefore, in this article, apart from section 10c (Metacognition) we will use the term cognition in the strict sense as proposed by McFarland & Bösser (1993).
Being able to plan ahead implies the capability of being able to internally simulate behavior, which basically means to be able to simulate movements of one’s own body within a given environment. This faculty requires, as a first step, the availability of a flexible, “manipulable” internal body-model. Planning ahead is interesting in a situation where the actually carried out reactive behavior cannot reach the currently pending goal. Therefore, a further expansion is required that allows for the invention of new behaviors. Together with the faculty of planning ahead, the system can then test newly-invented behaviors by applying internal simulation (“internal trial-and-error”) in order to find a solution for novel problems for which no solution is currently known to the system.[3]
This system, called “reaCog”, represents a basic version of a cognitive system in the strict sense intended by McFarland & Bösser (1993). As such, cognitive expansion does not function by itself, but only, like a parasite, on top of the reactive structures—a view that has been supported for a long time (Norman & Shallice 1986). The cognitive system depends on its reactive basis (therefore it is called reaCog). Therefore, the evolution of cognitive abilities crucially requires a correspondingly rich (procedural) memory.
In order to increase the richness of the memory of the complete system, in section 5 we introduce perceptual memory and complete the system by implementing “Word-nets”, a specific form of procedural and perceptual memory. In this way, the whole system is equipped with aspects of semantic memory, and can be claimed to represent a minimal cognitive system. We do not deal with learning but only discuss the properties of the finished network. The learning of some aspects has, however, been treated earlier (Hoinville et al. 2012; Cruse & Schilling 2010a).
After having introduced reaCog in sections 2– 6, we will, in sections 7– 11, discuss how more abstract functions, such as those described in, e.g., psychology, can be based on such a simply-structured network.
A fundamental problem when aiming for an understanding of phenomena like emotions or consciousness concerns the phenomenal aspect. The phenomenal aspect, often characterized as the hard problem (Chalmers 1997), refers to the strange, unexplainable phenomenon that physical systems, in our case represented by specific dynamics of neuronal structures, can be accompanied by subjective experience. Basic examples are experiencing pain, a color, or the internal state of an emotion (e.g., joy, fear). In section 7 we discuss this aspect in some detail and postulate that phenomenality is an emergent property. As mentioned, we are not aiming to solve the “hard” problem (Chalmers 1997), but we argue that it is sufficient to concentrate on the functional aspect.
In particular, we focus on the phenomena of emotions and consciousness. According to a number of authors (e.g., Valdez & Mehrabian 1994), these are assumed to be an inherent property for some cognitive systems. Therefore, although we do not want to state that emotions (section 8), attention, volition, intention (section 9), and consciousness (section 10) should necessarily be attributed to our system in any sense, we want to discuss to what extent properties characterized by different levels of description can be observed in our model.
Considering emotions, these are defined on different levels in the literature, so that there is no clear, generally accepted distinction between concepts like emotions, moods, motivations, drives, etc., which appear to form a continuum of overlapping, not clearly separable concepts (Pérez et al. 2012). Focusing on selected examples, in section 8 we will show how these phenomena may be attributed to our system, for example by referring to basic emotions as proposed by Ekman (1999).
Concerning consciousness, as discussed by Cleeremans (2005), this phenomenon should be approached by differentiating different aspects and treating those aspects separately. To this end, following Block (1995, 2001), Cleeremans (2005), introduces a distinction between access consciousness, metacognition, and phenomenal consciousness. In sections 10a (access consciousness) and 10c (metacognition) we will focus on whether and how the presented model can be related to the different aspects that are described by Cleeremans (2005), such as access consciousness and metacognition. From our point of view the simple control structure presented does fulfill some aspects of both access consciousness and metacognition. We shall finish with discussion and conclusion in sects. 11, 12.[4]