6 ReaCog: Emergent properties characterized by applying other levels of description
To summarise, the neural controller Walknet, (for details see Dürr et al. 2004; Schilling et al. 2013a) is an embodied control system (first-order embodiment, cf. Metzinger 2006, 2014). The reactive system can deal with varying unpredictable environments. It relies only on information that is available to the given mechanosensors, which is possible because both body and environment are integral to the overall computational system. In this way, the system is embodied. Of course, the system has a physical body, but even more, being embodied means that properties of the body (like its geometry) are exploited in computations of the controller. Using its own body as part of a loop through the world allows for dramatically simplifying computations (Schmitz et al. 2008). These properties are of course also present in the expanded version, reaCog. Even though in reaCog an internal body-model is introduced in order to control the high number of DoFs, reaCog still relies heavily on the cooperation of individual parts, i.e., the combination of couplings between body, environment, the internal body model, and the controller itself. In addition, this internal model of its own body is used for planning ahead. Such a network, following Metzinger (2006, 2014) represents a system that is characterized by second-order embodiment.
As shown in figure 2, the procedures forming the decentralized controller are basically arranged in parallel, i.e., each procedure obtains its own sensory input and provides a specific motor output. But procedures can also receive input from other procedures and can provide output directly to other procedures. This relatively flat, heterarchical structure is also applied by the Word-nets and in perceptual memory (Cruse & Schilling 2010a).
ReaCog automatically selects actions on the lower reactive level. Several of these procedures can be performed in parallel. On the cognitive level, decisions about which action to choose are not based solely on sensory input, but are chosen depending on the imagined action, since there is a stochastic effect due to noise in the attention controller. The decision is afterwards tested by internal simulation before it is applied to the real system, and only after successful execution is the proposed behavior stored in long-term memory. Therefore, this decision process can be envisioned as a Darwinian type of selection that begins from stochastic “mutations” that are then tested for “fitness” and selected based on this fitness. Thus, reaCog is a minimally cognitive system in the sense of the definition given by McFarland & Bösser (1993).
After we have defined the control network quantitatively, we can use reaCog to analyze emergent properties, which haven’t been implemented explicitly. As an example we have already considered a term like “tripod gait” that is sensible on a behavioral level in order to describe the emergent overall behavior of the walker. But on the control level there is no explicit tripod gait controller in reaCog (Schilling et al. 2008; Schilling et al. 2013a). The local influences coupling neighboring legs are responsible for overall coordinated walking behavior (different from many other hexapod controllers), and different gaits can emerge just by choosing different velocities. Therefore, apparent “gaits” or the observation that “cognitive maps” are required can be seen an emergent property of such a network.
In the following, we will turn to concepts that are usually applied in fields different from computer science or behavioral biology, like psychology and philosophy of mind. Choosing another level of description can help us gain a better understanding of the system on a more abstract level. In addition, this approach can lead to more operational definitions for concepts used in other disciplines. This is based on the assumption that many of the above-mentioned phenomena emerge (Vision 2011) and that they can be used as concepts only on a higher, more abstract level.
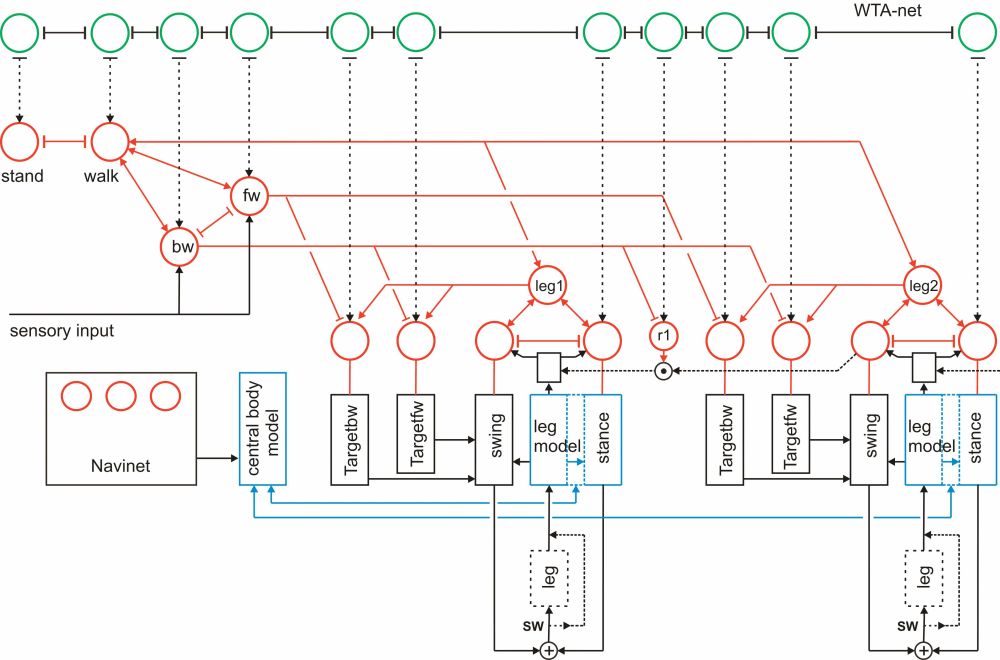 Figure 6: The controller of the reactive system as depicted in figure 2 expanded by a WTA-net (green units, not all connections are shown). Each WTA unit shows a bi-directional connection to a unit of the motivation unit network. This architecture provides the basis of reaCog, as explained in the main text (for further explanations see figure 2).
Figure 6: The controller of the reactive system as depicted in figure 2 expanded by a WTA-net (green units, not all connections are shown). Each WTA unit shows a bi-directional connection to a unit of the motivation unit network. This architecture provides the basis of reaCog, as explained in the main text (for further explanations see figure 2).
For some authors, consciousness is thought to be restricted to human beings. In contrast, other authors share the opinion that there are degrees of consciousness and that consciousness does occur, to a smaller degree, in lower-level animals (Dennett 1991). Showing that quite small and simplistic networks can allow for interesting cognitive properties (Chittka & Niven 2009; Menzel et al. 2007) supports such a view, as it provides a plausible evolutionary explanation for consciousness (or better degrees of consciousness). Agreeing with this basic assumption, we want to analyze to what extent our simple control network fulfils certain aspects of consciousness or emotions, even though we did not intend to realize this in our system in the beginning. The graded emergence of such high-level concepts would offer an evolutionary account and might allow us to address questions on the function, e.g., of consciousness, and explain how it relates to the control of behavior.