8 Emotions
Most authors generally agree that emotions are accompanied by subjective experience and that they have the function of helping the subject respond adaptively to environmental pressures. So there is the phenomenal aspect of emotions as well as a functional aspect. As we have already treated the phenomenal aspect above, here we will put aside this aspect, i.e., how it feels to be happy, sad, etc., and concentrate on the functional aspect of emotions.
Even though several authors assume or even demand that emotions are already present in simple reactive systems, and that they are necessary for a cognitive system (Valdez & Mehrabian 1994), in our above description of the properties of the network reaCog, any emotional aspects have not been taken into account. We did not require the term “emotions” to explain our approach, nor have we built in any kind of explicit emotional system. However, we will argue that there are emerging properties that are comparable to what is usually ascribed to properties of emotional systems. In the following, we want to focus on which parts in our system take this role and how the functions of these parts can be described and related to attributes of emotional systems.
The attempt to relate the properties of our network with the concept of emotions appears not very promising at first sight, because a series of interrelated conceptual terms such as emotions, attitudes, motivations, sentiments, moods, drives, and feelings can be found in the literature, and are defined in different but partly overlapping ways by different authors (Pérez et al. 2012). The reason for this disagreement might be that there are indeed no clearly separable mechanisms underlying these phenomena but rather we are dealing with a holistic system, which makes separation into clear-cut concepts difficult, if not impossible. As mentioned, the problem of being confronted with heterarchical structures appeared when looking at the reactive level (and reappeared later when dealing with perceptual memory), which led us to the neutral term “motivation unit“ for all “levels” of the heterarchy formed by the motivation unit network. To simplify matters, we will only deal with the term emotions in the following.
What might be possible functions of emotions? As follows from the examples of overlapping conceptual approaches found in the literature and mentioned below, emotions are attributed to various functions characterized by different levels of complexity. These range from enabling the agent to select sensory input (e.g., tunnel vision, Pérez et al. 2012) and activate different procedures, or, at a higher level, to select between different behavioral demands (e.g., hunger – thirst, flight – fight, Parisi & Petrosino 2010) up to more abstract states such as suffering from sadness or being in a state of happiness and controlling the corresponding behaviors (e.g., Ekman 1999). The lower-level decisions are well covered by our motivation unit network, and form a heterarchical system showing attractor states (e.g., swing – stance, Inbound – Outbound). These states allow for selection of sensory input and/or motor procedures that are stimulated by sensory input to specific motivation units. In the following, we therefore focus on higher-level states, such as, for example, emotions, as listed by Ekman (1999).
In general, and as discussed below, one can distinguish between prototypical approaches and reductionist approaches—the latter simplifying emotions down to just a few basic dimensions. In current research, both views appear to be justified as they both try to describe the phenomena observed, though at different levels of description.
Following the first approach, research tries to trace emotions back to a set of basic emotions, the combination of which can explain further derived emotions. This approach has been advocated by Plutchik (1980). A problem with such an approach is how to draw borders between emotions and what counts as a basic emotion. Ekman (1999) proposed a list of characteristics of similarity between emotions and came up with a set of fifteen basic emotions. Later on, based on their relation to facial expressions, he reduced this number to six. This set, which is now widely used as the basic set of emotions in many different contexts, consists of happiness, anger, disgust, sadness, fear, and surprise. As an example, let us consider happiness. Happiness is elicited when we are in a state of having had or expecting positive situations. The behavioral effect of happiness might be characterized as being open to new ideas, perhaps not being too critical and open to performing new, unconventional behaviors. How might such a phenomenon be represented in reaCog? First of all, a neuronal state of the motivation network would correspond to a specific emotion. Such a network state is usually triggered by some sensory stimulus eliciting an emotion. This stimulus activates specific, basically innate, networks which, when active, influence the system and put it into the respective emotional state. Such a network—which could, in the most reduced case, consist of just one neuronal unit—has not been introduced in reaCog, but if assumed as given, it may modulate meta-control parameters such as, for example, noise levels, thresholds, or learning rates (Doya 2000, 2002). To stick to our example of “happiness”, activation of such a network, which represents stimulus situations considered to elicit this state may, within the Spreading Activation Layer, lead to a faster diffusion process, perhaps supported by stronger noise amplitude. Such a broadening of the attention range as a consequence of positive affects has been reported by Dreisbach & Goschke (2004). In addition, or as an alternative, the threshold for the problem detectors that we mentioned in section 4 might be increased. As a consequence, the system would take more risks. All these changes would lead to an increase in “creativity”, i.e., the ability to find new ideas for possible solutions. Corresponding structures might be found in the other basic emotions listed by Ekman.
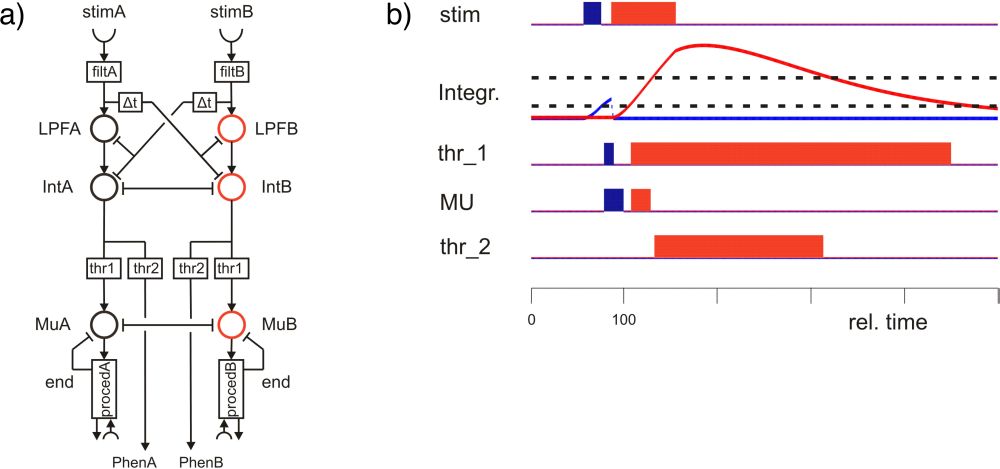 Figure 8: (a) A hypothetical network that is capable of dealing with some dual task experiments, for example the backward masking experiment. Stimulation of one of the procedures, A or B, activates a low-pass filter (LPFA, LPFB) followed by an integrator (IntA, IntB) and inhibits the corresponding units of the other procedure for a limited time (Δt). The integrators are coupled via mutual inhibition. After activation of one of the integrator units has reached threshold thr1 (lower dashed line), the corresponding motor motivation unit (MuA or MuB), coupled via mutual inhibition, is activated, which drives the behavior. If threshold thr2 (upper dashed line) is reached, the stimulus can be phenomenally experienced. A feedback from the procedure can provide an “end” signal to inhibit its own motivation unit. (b) Temporal development of the activation of some units (procedure A, blue, procedure B, red). Abscissa is relative time. If stimB follows briefly after stimA, the unit IntA may reach its motor threshold thr1, but not the threshold thr2 for eliciting the phenomenal experience. In contrast, stimB elicits both the motor output and the phenomenal experience that corresponds to the backward masking effect (for details see Cruse & Schilling 2014).
Figure 8: (a) A hypothetical network that is capable of dealing with some dual task experiments, for example the backward masking experiment. Stimulation of one of the procedures, A or B, activates a low-pass filter (LPFA, LPFB) followed by an integrator (IntA, IntB) and inhibits the corresponding units of the other procedure for a limited time (Δt). The integrators are coupled via mutual inhibition. After activation of one of the integrator units has reached threshold thr1 (lower dashed line), the corresponding motor motivation unit (MuA or MuB), coupled via mutual inhibition, is activated, which drives the behavior. If threshold thr2 (upper dashed line) is reached, the stimulus can be phenomenally experienced. A feedback from the procedure can provide an “end” signal to inhibit its own motivation unit. (b) Temporal development of the activation of some units (procedure A, blue, procedure B, red). Abscissa is relative time. If stimB follows briefly after stimA, the unit IntA may reach its motor threshold thr1, but not the threshold thr2 for eliciting the phenomenal experience. In contrast, stimB elicits both the motor output and the phenomenal experience that corresponds to the backward masking effect (for details see Cruse & Schilling 2014).
In the second group of approaches to characterizing the emotions, emotions are described through a set of dimensions that represent the emotional state. We will briefly sketch this seemingly alternative reductionist approach and will again draw parallels with reaCog. The connection to reaCog is made on a different level and is therefore not logically exclusive with respect to the former. Wundt (1863) was quite opposed to the idea of breaking down emotions into a set of basic emotions that serve as prototypes, mainly because he assumed that a set of emotions is better described by a continuum than by separable categories. This follows his idea of describing emotions through principal components leading to dimensional systems, like the pleasure-arousal-dominance (PAD) framework (Mehrabian 1996). In the PAD framework, three dimensions span the space of the emotions. The first describes the state pleasure–displeasure and corresponds to the affective state (excited – relaxed). Arousal, as the second dimension, represents the level of mental alertness and physical activity (tense – sleepy). The third axis describes the level of dominance–submissiveness, i.e., the feeling of being in control. The three factors of the PAD framework have successfully been employed as semantic differential factors to describe emotional states in different contexts, e.g., for describing postures, facial expressions, gestures, and vocal expression. The three dimensions appear to be sufficient as they capture large parts of the variance (Mehrabian 1996). Mehrabian has related the three traits—pleasure, arousal and dominance—to specific cognitive characteristics. First, pleasure-displeasure, according to Mehrabian, deals with the fulfillment of expectations. Fulfillment of an expectation (or not) occurs when, during a problematic situation, planning ahead is activated and after some time and searching a solution is found (or not)—a state that can be found in reaCog, too. But fulfillment of expectation might also occur at lower levels, when, for example, a simple procedure such as Swingnet is equipped with a target value and this goal is either reached or not. The error signal might then be used as a measure for fulfillment of expectation. For example, it might be used as problem detector in the case mentioned earlier, when a subject tries to lift a leg off the ground, but due to an inconvenient load distribution, the body falls down and the leg remains in contact with the substrate. The arousability trait, as introduced by Mehrabian (1996), was meant to incorporate the process of “stimulus screening”. In short, “stimulus screening” is a process of attentional focusing. Such a process of focusing attention occurs in our system, too, as, on the one end of the spectrum, the system broadly attends to all environmental influences as perceived through its sensors, and this is characterized as its being in the “reactive state”. At the other extreme, when a specific problematic situation occurs, it is necessary to focus attention and to guide the search for a solution towards specific modalities, parts of the body, etc. But even on the reactive level, attention selection can be observed, as we mentioned earlier. Finally, the dominance trait (“generalized expectations of control” Mehrabian 1996) concerns the extent to which the agent takes over in the actual situation and is not only responding and reacting, which agrees with the main thesis of our approach, namely that it is possible to switch between the reactive mode and the cognitive mode. Similarly, Russell & Norvig (2003) have required an autonomous agent to be able to both react to known situations and to be in control of the situation itself (or as Russell and Norvig call it: being proactive).
Our approach, as we have mentioned, does not aim to build specific emotional properties, but tries to build a functional autonomous system and then to look at the aspects of emotional properties that might be found in the network or gained after some further functional expansion of the network. We have listed examples from different levels of description in psychology and point to related properties in our network. We are not arguing that reaCog has emotions (we are in any case agnostic with respect to the subjective aspect). Rather, we claim that by taking a network like reaCog as a scaffold, different conceptualizations of the functional aspects of emotions can be mapped onto such a quantitatively defined system and thus be considered emergent properties.
It might be added here that recent studies support the idea that emotion-like states do indeed occur in brains which are by far less complex than mammalian brains. Yang et al. (2014) could show that the concept of “learned uncontrollability”, generally considered as an animal model for depression as observed in humans, can be found in Drosophila, too. For vertebrates, it is known that stress induces the state of fear or of anxiety, the latter being considered as a second order emotion. Fossat et al. (2014) could show that a crayfish treated by stressors (i) avoids illuminated parts of the environment and (b) shows an increased level of serotonin in the brain, as can be observed in vertebrates. As in vertebrates, the state of anxiety could be relieved by application of anxiolytic drugs. Both results have been interpreted such that the ability to adopt emotional states must have been evolved before the separation of the arthropods and vertebrates.